Astar 寻路算法
A star算法也叫A星(A*)算法,这是一种在图形平面上,有多个节点的路径,求出最低通过成本的算法。常用于游戏中的NPC的移动计算,或网络游戏的BOT的移动计算上.该算法综合了最良优先搜索和Dijkstra算法的优点:在进行启发式搜索提高算法效率的同时,可以保证找到一条最优路径(基于评估函数)。
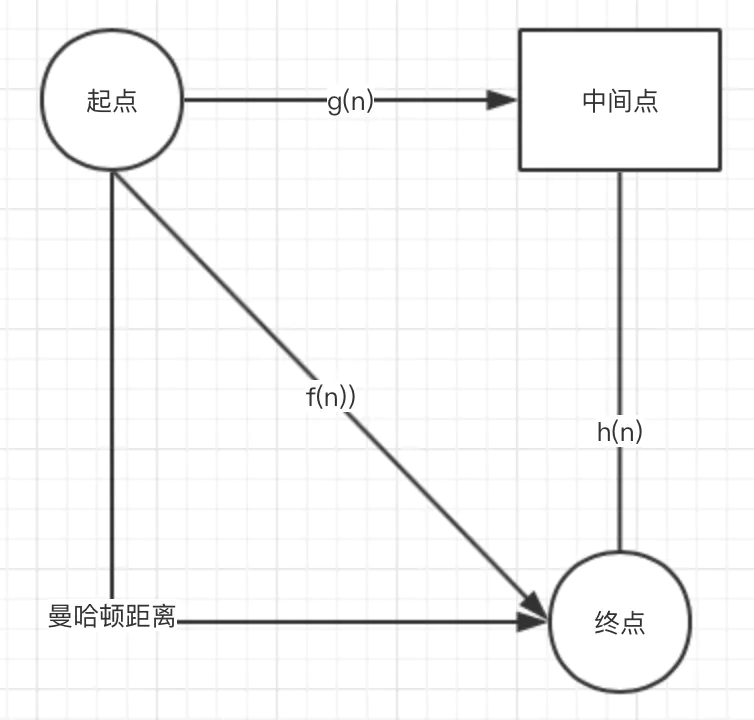
在A star算法中,如果我们要计算两点之间的距离,例如上图中起点到终点的距离,这时我们把两点之间的直线距离用f(n)表示,而两点之间的水平距离+竖直距离=曼哈顿距离(这个后面会用到,使用曼哈顿距离可以提高运算的速度,如果使用f(n)那么需要不断的计算三角函数)
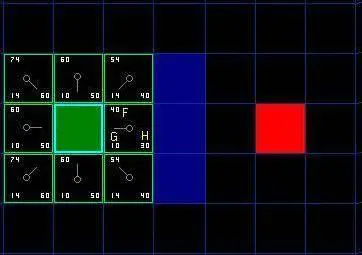
如图,首先假设我们要从绿色的点走到红色的点,蓝色的点表示障碍物。
那么:首先我们定义两个队列open和close,open表示正在处理或者准备处理的点,close表示已经处理过或者不处理的点
- 绿色点周围的8个点就是我们第一步可以走的位置
- 首先我们假设左边的水平方向和竖直方向的距离都是10,那么45度方向距离就是14(即√200),
- 所以我们在每个方块的左下角标一个数字g(n),它代表这个方块距离起始点的距离
- 然后在每个方块的右下角标一个数字h(n),它代表这个方块距离终点的曼哈顿距离(先不考虑障碍物)。
- 所以我们可以大致估算出,每个方块所在路径到终点的大致距离,就是f(n)=g(n)+h(n)
- 现在我们将起始点周围的8个点加入到open队列中去,表示接下来要处理这8个点,然后将起始点加到close队列中,表示起始点已经处理过了
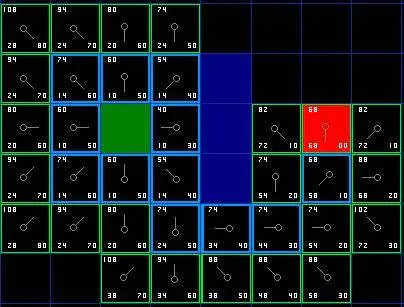
- 然后我们依照f(n)对open队列进行从小到大进行排序,取出f(n)最小的那个点,当作新的起始点,重复上面1-7步,直到到达终点,就可以得到下图
参考:https://www.jianshu.com/p/950233af52df
Erlang实现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
-module(pathFinding).
%% 每个坐标格子大小
-define(ASTAR_MAP_WIDTH, 10).
%% 每个格子中心对角线距离 √10 * 10 + 10 * 10 ~= 14
-define(ASTAR_MAP_DIAGONAL, 14).
-record(astar_point, {pos = {0, 0}, parent = {0, 0}, g = 0, h = 0, f = 0}).
%% pos x,y坐标
%% g 此位置距离起点的距离
%% h 此位置距离终点的曼哈顿距离(不考虑障碍物),曼哈顿距离 = 水平距离 + 竖直距离
%% f 此位置到达终点的大致距离 f = g + h
%% parent 记录父节点:起点到该点最短距离的前一个点
-export([astar/8]).
%% moveSpeed 移动速度(每次移动最大格子数), 用于构造简化路径,若moveSpeed=1则不构造
astar(CannotStandPoints, Width, Height, StartPosX, StartPosY, TargetPosX, TargetPosY, MoveSpeed) ->
CheckMapWH = Width > 0 andalso Height > 0,
case CheckMapWH of
true ->
CannotStandPointsWithEdge = astar_create_edge(Width, Height, CannotStandPoints),
CheckStartAndTarget = lists:member({StartPosX, StartPosY}, CannotStandPointsWithEdge) == false
andalso lists:member({TargetPosX, TargetPosY}, CannotStandPointsWithEdge) == false,
case CheckStartAndTarget of
true ->
StartH = abs(StartPosX - TargetPosX) * ?ASTAR_MAP_WIDTH + abs(StartPosY - TargetPosY) * ?ASTAR_MAP_WIDTH,
StartPoint = #astar_point{pos = {StartPosX, StartPosY}, parent = {StartPosX, StartPosY}, h = StartH, f = StartH},
TargetPoint = #astar_point{pos = {TargetPosX, TargetPosY}},
Path = astar_find_path(StartPoint, TargetPoint, CannotStandPointsWithEdge, [StartPoint], []),
case lists:keyfind(TargetPoint#astar_point.pos, #astar_point.pos, Path) of
#astar_point{} ->
ResultPath = astar_find_path_result(Path, TargetPoint#astar_point.pos, []),
case MoveSpeed of
1 ->
ResultPath;
_ ->
astar_find_path_simple_result(ResultPath, MoveSpeed, [])
end;
_ ->
[]
end;
_ ->
[]
end;
_ ->
[]
end.
%% 创建地图边缘
astar_create_edge(Width, Height, CannotStandPoints) ->
CannotStandPointsWithTBEdge = astar_create_edge_top_and_bottom(Width, Height, CannotStandPoints),
astar_create_edge_left_and_right(Height, Width, CannotStandPointsWithTBEdge).
%% 创建地图上下边缘
astar_create_edge_top_and_bottom(-1, _, CannotStandPoints) ->
CannotStandPoints;
astar_create_edge_top_and_bottom(Width, Height, CannotStandPoints) ->
astar_create_edge_top_and_bottom(Width - 1, Height, [{0, Width}, {Height + 1, Width} | CannotStandPoints]).
%% 创建地图左右边缘
astar_create_edge_left_and_right(-1, _, CannotStandPoints) ->
CannotStandPoints;
astar_create_edge_left_and_right(Height, Width, CannotStandPoints) ->
astar_create_edge_left_and_right(Height - 1, Width, [{Height, 0}, {Height, Width + 1} | CannotStandPoints]).
astar_find_path(_StartPoint, _TargetPoint, _CannotStandPoints, [], CloseList) ->
CloseList;
astar_find_path(StartPoint, TargetPoint, CannotStandPoints, [Point | OpenList], CloseList) ->
case lists:keyfind(Point#astar_point.pos, #astar_point.pos, CloseList) of
false ->
NewOpenList = astar_add_neighbor(Point, StartPoint, TargetPoint, OpenList, CannotStandPoints, CloseList),
CheckEnd = Point#astar_point.pos == TargetPoint#astar_point.pos,
case CheckEnd of
true ->
[Point | CloseList];
_ ->
astar_find_path(StartPoint, TargetPoint, CannotStandPoints, NewOpenList, [Point | CloseList])
end;
_ ->
astar_find_path(StartPoint, TargetPoint, CannotStandPoints, OpenList, CloseList)
end.
%% 添加周围(八个方向)点到open列表中
astar_add_neighbor(Point, _StartPoint, TargetPoint, OpenList, CannotStandPoints, CloseList) ->
{X, Y} = Point#astar_point.pos,
%% 上
OpenList1 = astar_add_neighbor_to_open(X - 1, Y, TargetPoint, OpenList, CloseList, CannotStandPoints, Point#astar_point.pos, Point#astar_point.g + ?ASTAR_MAP_WIDTH),
%% 下
OpenList2 = astar_add_neighbor_to_open(X + 1, Y, TargetPoint, OpenList1, CloseList, CannotStandPoints, Point#astar_point.pos, Point#astar_point.g + ?ASTAR_MAP_WIDTH),
%% 左
OpenList3 = astar_add_neighbor_to_open(X, Y - 1, TargetPoint, OpenList2, CloseList, CannotStandPoints, Point#astar_point.pos, Point#astar_point.g + ?ASTAR_MAP_WIDTH),
%% 右
OpenList4 = astar_add_neighbor_to_open(X, Y + 1, TargetPoint, OpenList3, CloseList, CannotStandPoints, Point#astar_point.pos, Point#astar_point.g + ?ASTAR_MAP_WIDTH),
%% 左上
OpenList5 = astar_add_neighbor_to_open(X - 1, Y - 1, TargetPoint, OpenList4, CloseList, CannotStandPoints, Point#astar_point.pos, Point#astar_point.g + ?ASTAR_MAP_DIAGONAL),
%% 左下
OpenList6 = astar_add_neighbor_to_open(X + 1, Y - 1, TargetPoint, OpenList5, CloseList, CannotStandPoints, Point#astar_point.pos, Point#astar_point.g + ?ASTAR_MAP_DIAGONAL),
%% 右上
OpenList7 = astar_add_neighbor_to_open(X - 1, Y + 1, TargetPoint, OpenList6, CloseList, CannotStandPoints, Point#astar_point.pos, Point#astar_point.g + ?ASTAR_MAP_DIAGONAL),
%% 右下
OpenList8 = astar_add_neighbor_to_open(X + 1, Y + 1, TargetPoint, OpenList7, CloseList, CannotStandPoints, Point#astar_point.pos, Point#astar_point.g + ?ASTAR_MAP_DIAGONAL),
SortFun = fun(P1, P2) -> P1#astar_point.h < P2#astar_point.h end,
lists:sort(SortFun, OpenList8).
astar_add_neighbor_to_open(X, Y, TargetPoint, OpenList, CloseList, CannotStandPoints, ParentPos, G) ->
case lists:member({X, Y}, CannotStandPoints) of
false ->
case lists:keyfind({X, Y}, #astar_point.pos, CloseList) of
false ->
case lists:keyfind({X, Y}, #astar_point.pos, OpenList) of
false ->
{TargetPosX, TargetPosY} = TargetPoint#astar_point.pos,
H = abs(X - TargetPosX) * ?ASTAR_MAP_WIDTH + abs(Y - TargetPosY) * ?ASTAR_MAP_WIDTH,
Point = #astar_point{pos = {X, Y}, parent = ParentPos, g = G, h = H, f = G + H},
[Point | OpenList];
OldPoint ->
CheckReplace = G < OldPoint#astar_point.g,
case CheckReplace of
true ->
NewPoint = OldPoint#astar_point{parent = ParentPos, g = G, f = G + OldPoint#astar_point.h},
lists:keyreplace({X, Y}, #astar_point.pos, OpenList, NewPoint);
_ ->
OpenList
end
end;
_ ->
OpenList
end;
_ ->
OpenList
end.
%% 构建路径结果
astar_find_path_result([], _, _) ->
[];
astar_find_path_result(Path, Pos, PosList) ->
case lists:keyfind(Pos, #astar_point.pos, Path) of
#astar_point{parent = NextPos} ->
case NextPos of
Pos ->
[Pos | PosList];
_ ->
astar_find_path_result(Path, NextPos, [Pos | PosList])
end;
_ ->
PosList
end.
astar_find_path_simple_result([], _MoveSpeed, PosList) ->
lists:reverse(PosList);
astar_find_path_simple_result([{X, Y}], MoveSpeed, PosList) ->
astar_find_path_simple_result([], MoveSpeed, [{X, Y} | PosList]);
astar_find_path_simple_result([{X1, Y1}, {X2, Y2}], MoveSpeed, PosList) ->
astar_find_path_simple_result([], MoveSpeed, [{X2, Y2}, {X1, Y1} | PosList]);
astar_find_path_simple_result([{X1, Y1}, {X2, Y2}, {X3, Y3} | Path], MoveSpeed, PosList) ->
CheckIsSameDis = (X2-X1)*(Y3-Y2) == (X3 - X2) * (Y2 - Y1),
case CheckIsSameDis of
true ->
CheckMoveSpeed = MoveSpeed >= math:sqrt(math:pow(X1 - X3, 2) + math:pow(Y1 - Y3, 2)),
case CheckMoveSpeed of
true ->
astar_find_path_simple_result([{X1, Y1}, {X3, Y3} | Path], MoveSpeed, PosList);
_ ->
astar_find_path_simple_result([{X2, Y2}, {X3, Y3} | Path], MoveSpeed, [{X1, Y1} | PosList])
end;
_ ->
astar_find_path_simple_result([{X2, Y2}, {X3, Y3} | Path], MoveSpeed, [{X1, Y1} | PosList])
end.
测试代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
-module(pathFinding_test).
-include_lib("eunit/include/eunit.hrl").
-compile([export_all, nowarn_export_all]).
astar_test() ->
% [0, 0, 0, 0, 0, 0, 0, 0]
% [0, 0, 0, 0, 1, 0, 0, 0]
% [0, 0, s, 0, 1, 0, t, 0]
% [0, 0, 0, 0, 1, 0, 0, 0]
% [0, 0, 0, 0, 0, 0, 0, 0]
% [0, 0, 0, 0, 0, 0, 0, 0]
CannotStandPoints = [{2, 5}, {3, 5}, {4, 5}],
Width = 8,
Height = 6,
StartPosX = 3,
StartPosY = 3,
TargetPosX = 3,
TargetPosY = 7,
MoveSpeed = 1,
Path = pathFinding:astar(CannotStandPoints, Width, Height, StartPosX, StartPosY, TargetPosX, TargetPosY, MoveSpeed),
[{StartPosX, StartPosY}, {4, 4}, {5, 5}, {4, 6}, {TargetPosX, TargetPosY}] = Path,
ok.
astar2_test() ->
% [0, 0, 0, 0, 0, 0, 0, 0]
% [0, 0, 0, 0, 1, 0, 0, 0]
% [0, 0, s, 0, 1, 0, t, 0]
% [0, 0, 0, 0, 1, 0, 0, 0]
% [0, 0, 0, 0, 1, 0, 0, 0]
% [0, 0, 0, 0, 1, 0, 0, 0]
CannotStandPoints = [{2, 5}, {3, 5}, {4, 5}, {5, 5}, {6, 5}],
Width = 8,
Height = 6,
StartPosX = 3,
StartPosY = 3,
TargetPosX = 3,
TargetPosY = 7,
MoveSpeed = 1,
Path = pathFinding:astar(CannotStandPoints, Width, Height, StartPosX, StartPosY, TargetPosX, TargetPosY, MoveSpeed),
[{StartPosX, StartPosY}, {2, 4}, {1, 5}, {2, 6}, {TargetPosX, TargetPosY}] = Path,
ok.
astar3_test() ->
% [0, 0, 0, 0, 1, 0, 0, 0]
% [0, 0, 0, 0, 1, 0, 0, 0]
% [0, 0, s, 0, 1, 0, t, 0]
% [0, 0, 0, 0, 1, 0, 0, 0]
% [0, 0, 0, 0, 1, 0, 0, 0]
% [0, 0, 0, 0, 1, 0, 0, 0]
CannotStandPoints = [{1, 5}, {2, 5}, {3, 5}, {4, 5}, {5, 5}, {6, 5}],
Width = 8,
Height = 6,
StartPosX = 3,
StartPosY = 3,
TargetPosX = 3,
TargetPosY = 7,
MoveSpeed = 1,
Path = pathFinding:astar(CannotStandPoints, Width, Height, StartPosX, StartPosY, TargetPosX, TargetPosY, MoveSpeed),
[] = Path,
ok.
astar4_test() ->
% [0, 0, 0, 0, 1, 0, 0, 0]
% [0, 0, 0, 0, 0, 0, 0, 0]
% [0, 0, 0, 0, 1, 0, 0, 0]
% [0, 0, 0, 0, 1, 0, 0, 0]
% [0, 0, 0, 0, 1, 0, 0, 0]
% [0, 0, 0, s, 1, t, 0, 0]
CannotStandPoints = [{1, 5}, {3, 5}, {4, 5}, {5, 5}, {6, 5}],
Width = 8,
Height = 6,
StartPosX = 6,
StartPosY = 4,
TargetPosX = 6,
TargetPosY = 6,
MoveSpeed = 1,
Path = pathFinding:astar(CannotStandPoints, Width, Height, StartPosX, StartPosY, TargetPosX, TargetPosY, MoveSpeed),
[{6,4},{5,4},{4,4},{3,4},{2,5},{3,6},{4,6},{5,6},{6,6}] = Path,
ok.
astar5_test() ->
% [0, 0, 0, 0, 1, 0, 0, 0]
% [0, 0, 0, 0, 0, 0, 0, 0]
% [0, 0, 0, 0, 1, 0, 0, 0]
% [0, 0, 0, 0, 1, 0, 0, 0]
% [0, 0, 0, 0, 1, 0, 0, 0]
% [s, 0, 0, 0, 1, t, 0, 0]
CannotStandPoints = [{1, 5}, {3, 5}, {4, 5}, {5, 5}, {6, 5}],
Width = 8,
Height = 6,
StartPosX = 6,
StartPosY = 1,
TargetPosX = 6,
TargetPosY = 6,
MoveSpeed = 1,
Path = pathFinding:astar(CannotStandPoints, Width, Height, StartPosX, StartPosY, TargetPosX, TargetPosY, MoveSpeed),
[{6,1},{6,2},{5,3},{4,4},{3,4},{2,5},{3,6},{4,6},{5,6},{6,6}] = Path,
ok.
astar6_test() ->
% [0, 0, 0, 0, 0, 0, 0, 0]
% [0, 0, 0, 0, 1, 0, 0, 0]
% [0, 0, s, 0, 1, 0, t, 0]
% [0, 0, 0, 0, 1, 0, 0, 0]
% [0, 0, 0, 0, 0, 0, 0, 0]
% [0, 0, 0, 0, 0, 0, 0, 0]
CannotStandPoints = [{2, 5}, {3, 5}, {4, 5}],
Width = 8,
Height = 6,
StartPosX = 3,
StartPosY = 3,
TargetPosX = 3,
TargetPosY = 7,
MoveSpeed = 3,
Path = pathFinding:astar(CannotStandPoints, Width, Height, StartPosX, StartPosY, TargetPosX, TargetPosY, MoveSpeed),
[{StartPosX, StartPosY}, {5, 5}, {TargetPosX, TargetPosY}] = Path,
ok.
astar7_test() ->
% [0, 0, 0, 0, 1, 0, 0, 0]
% [0, 0, 0, 0, 0, 0, 0, 0]
% [0, 0, 0, 0, 1, 0, 0, 0]
% [0, 0, 0, 0, 1, 0, 0, 0]
% [0, 0, 0, 0, 1, 0, 0, 0]
% [s, 0, 0, 0, 1, t, 0, 0]
CannotStandPoints = [{1, 5}, {3, 5}, {4, 5}, {5, 5}, {6, 5}],
Width = 8,
Height = 6,
StartPosX = 6,
StartPosY = 1,
TargetPosX = 6,
TargetPosY = 6,
MoveSpeed = 4,
Path = pathFinding:astar(CannotStandPoints, Width, Height, StartPosX, StartPosY, TargetPosX, TargetPosY, MoveSpeed),
[{6,1},{6,2},{4,4},{3,4},{2,5},{3,6},{6,6}] = Path,
ok.